zum Warenkorb 0,00 €
0Aus ein paar chinesischen Platinen und der Frage „Bekommt Ihr das unter ROBO Pro ans Laufen?“ entstand auf der Südconvention 2018 die Idee zu einem fischertechnik-Schrittmotorcontroller.
Nach wenigen Stunden brummte bereits der erste Schrittmotor am Protoboard. Es zeigte sich jedoch sehr schnell, dass die Tücke wie immer in Detail liegt und die Integration ins fischertechnik-System aus weit mehr als ein
paar fernöstlichen Platinen besteht.
Der ftPwrDrive-Controller ist ein Community-Projekt, mit dem wir jedem fischertechniker eine Plug & Play-Lösung für Schrittmotoren und Servos an den gängigenControllern – TX, TXT und ftDuino – zur Verfügung stellen wollen.
Der ROBOTICS BT Smart Controller kann leider nicht unterstützt werden, da er keine Möglichkeit zum Anschluss externer Hardware bietet. Den Controller wird es als fertiges Gerät geben, so dass man seine Motoren direkt anschließen und loslegen kann.
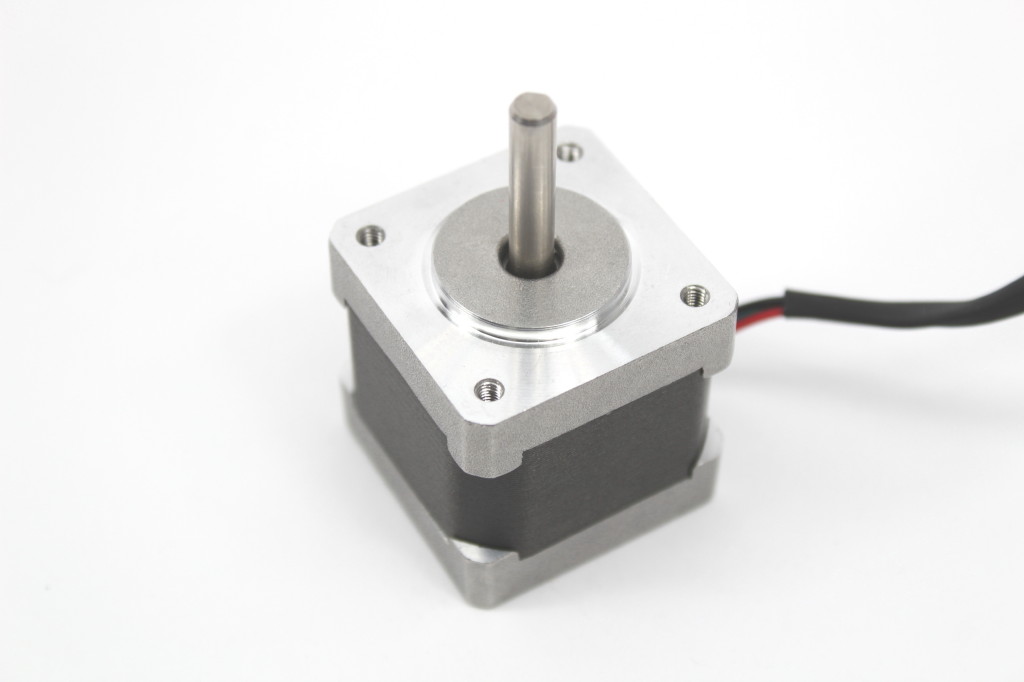
Am ftPwrDrive-Controller können bis zu vier Schrittmotoren angeschlossen werden. Hier bietet sich der Typ NEMA 14 an, der u. a. auch beim fischertechnik-3D-Drucker zum Einsatz kommt. Durch eine Stromjustierung kann der Controller
bei Bedarf auch auf andere Schrittmotoren eingestellt werden. Der Anschluss der Motoren erfolgt über die gewohnten ft-Bundhülsen. Der Controller besitzt für die vier Schrittmotor-Ausgänge jeweils einen Tastereingang. Diese werden von der Firmware sowohl als Endschalter als auch als Referenzpunkt genutzt. Wird ein Endschalter ausgelöst, so stoppt die Firmware den Motor. Durch die höheren Leistungsdaten könnten sonst die fischertechnik-Bausteine im Modell Schaden nehmen. Gleichzeitig kann die Firmware den Endschalter als Referenz- oder Nullpunkt nutzen. Die Firmware fährt den Motor so lange, so dass er gerade nicht den Endschalter auslöst. Man erhält so eine gut reproduzierbare Referenzposition im Modell, auf der alle anderen Fahrkommandos aufsetzen können.
An die vier Servo-Ausgänge können fischertechnik-Servos aus dem Control-Set oder kompatible Servos direkt angeschlossen werden. Schrittmotoren sind sehr hungrig und kommen mit der fischertechnik-9V-Versorgung nicht in Gang. Sie benötigen 18-24V Betriebsspannung mit für fischertechnik hohen Leistungsdaten. Da ein NEMA-14- Motor pro Spule bis zu 0,8A Strom zieht, werden Netzteile mit hoher Leistung benötigt. Als Stromversorgung eignen sich Notebooknetzteile mit 18-24V ab 100W Leistung. Der Anschluss an den Controller erfolgt über den I²C-Bus. TX und ftDuino können direkt über den 6-poligen EXT-Stecker verbunden werden; der TXT benötigt zusätzlich einen Levelshifter wie zum Beispiel den ft-Extender.
Die Programmierung des ftPwrDrive kannin verschiedenen Umgebungen erfolgen. Eine ROBO Pro-Bibliothek gibt es bereits. Für die Community Firmware und python wird es eine Integration in ftrobopy geben; der ftDuino erhält eine Arduino-Bibliothek.
Schrittmotoren
Beim Schrittmotor liegen die Spulen im Gehäuse. Permanentmagnete sind auf der Welle des Motors angebracht. Fließt nacheinander durch die Spulen Strom, so dreht sich der Motor je Signal von Spule zu Spule. Der Motor führt je Steuersignal einen Schritt aus. Die Schrittweite eines NEMA-14-Motors beträgt 1,8° und erlaubt somit eine für fischertechnik sehr präzise Positionssteuerung. Eine gute Beschreibung der Funktionsweise, Kennlinien und unterschiedlichen
Typen ist in Schrittmotoren. rn-wissen.de zu finden. Durch ihre Bauweise sind Schrittmotoren schwerer als fischertechnik-Elektromotoren und echte Stromfresser. Für batteriebetriebene Erkundungsroboter sind sie definitiv die falsche Wahl. Für stationäre Modelle haben Schrittmotoren aber viele Vorteile:
- Der Schrittmotor benötigt keinen Dekoder, er hat ihn im Antrieb integriert. Er fährt die angegebene Schrittzahl und bleibt dann ohne Nachlauf stehen. Ideal für Plotter, 3D-Drucker, Fräsen und Roboterarme.
- Schrittmotoren können sich extrem langsam bewegen. Getriebe werden in der Regel nicht benötigt. Ohne Getriebe entfällt das Umkehrspiel bei Plottern und Druckern. Uhren können einfach gebaut werden.
- Die NEMA-14-Baureihe ist stärker als XM- oder Encodermotoren. Im Stillstand und bei geringen Drehzahlen bringen sie sogar ihre höchste Leistung. Der Roboterarm bleibt somit im Stillstand stehen und sinkt nicht ab.
- Synchrones Verfahren von mehreren Achsen ist eine für Schrittmotor-Steuerungen relativ einfache Übung. Mit einem x/y-Antrieb und Encodermotoren echte Kreise in ROBO Pro zu zeichnen ist dagegen fast unmöglich.
Servos
Servomotorenbestehen aus kleinen Elektromotoren mit einer integrierten Positionsregelung. Der Servo erhält über ein Steuersignal eine Winkelvorgabe, die Positionsregelung fährt diesen Winkel an und hält anschließend die Winkelposition
ein. Im Modellbau wird als Steuersignal in der Regel ein PWM-Signal eingesetzt. Sie können sich so nur um wenige Grad bewegen, eignen sich aber für alle Stellmotoranwendungen, da sie wie der Schrittmotor die Endposition halten. Servos sind verhältnismäßig klein und leicht. Als Stromversorgung benötigen sie eine Spannung zwischen 5V und 6,8V. Die klassische fischertechnik-Anwendung ist der Einsatz als Lenkung in Verbindung mit dem ControlSet. Es lassen sich damit
aber auch elektrisch angetriebene Kugelbahnweichen bauen oder Finger einer mechanischen Hand steuern. In der ft:pedia wurden bereits Servo-Ansteuerungen auf Basis von Adafruit-Platinen vorgestellt.
Bezug:
Vorbestellung ftPwrDrive
NEMA-14 Motor
Motor-Halter
M3 Befestigungsschrauben
Abtriebshülse
Abtriebsritzel
Weitere Dokumentation
In ft:pedia 4-2018 beschreibt Teil1 das Konzept und gibt weitere Informationen zum Zubehör.
Im zweiten Teil des Beitrags werden wir Euch den fertigen Controller und seine Programmierung in den unterschiedlichen Sprachen vorstellen. Geplant ist dafür ft:pedia 1/2019