zum Warenkorb 0,00 €
0

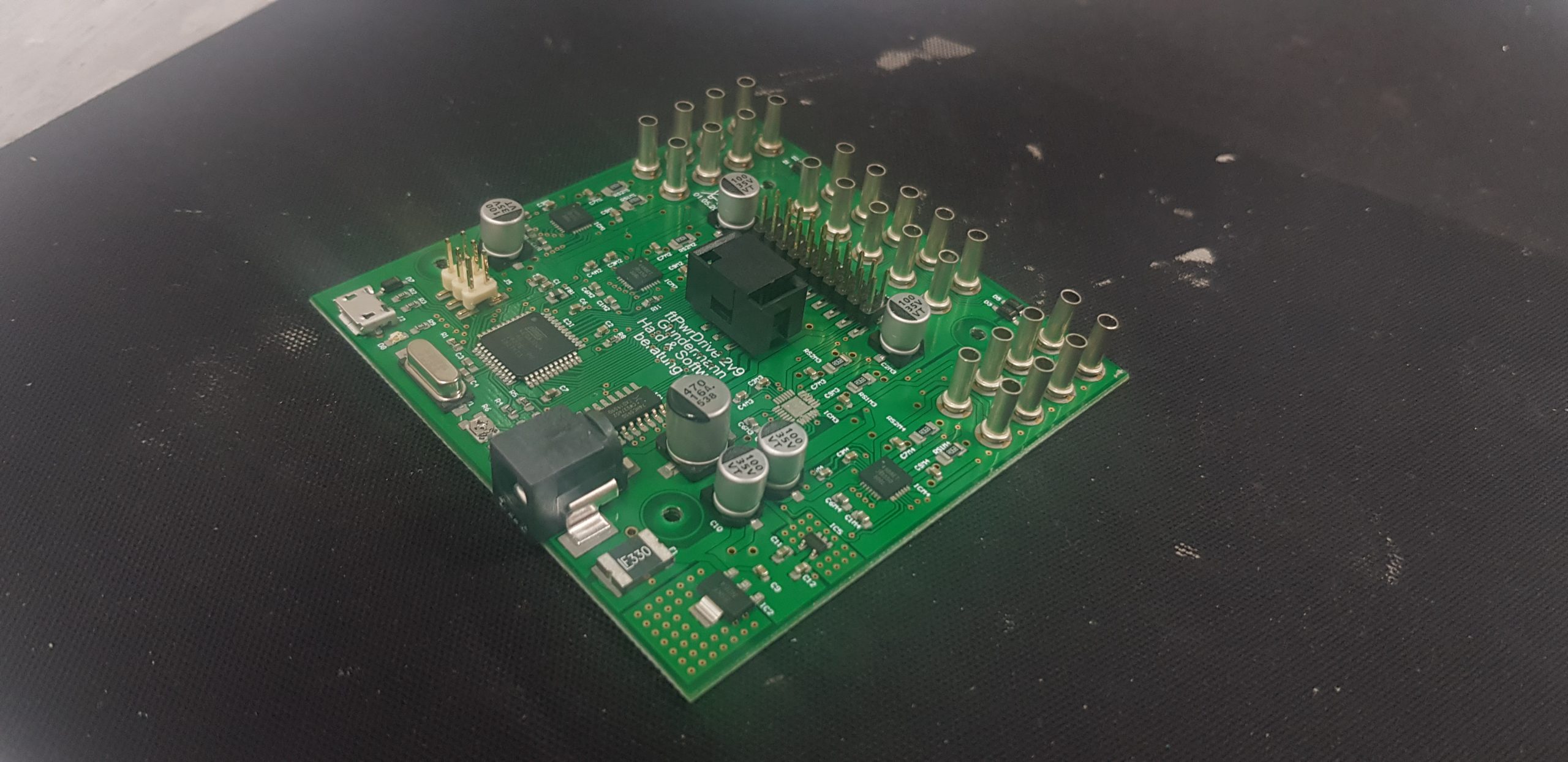
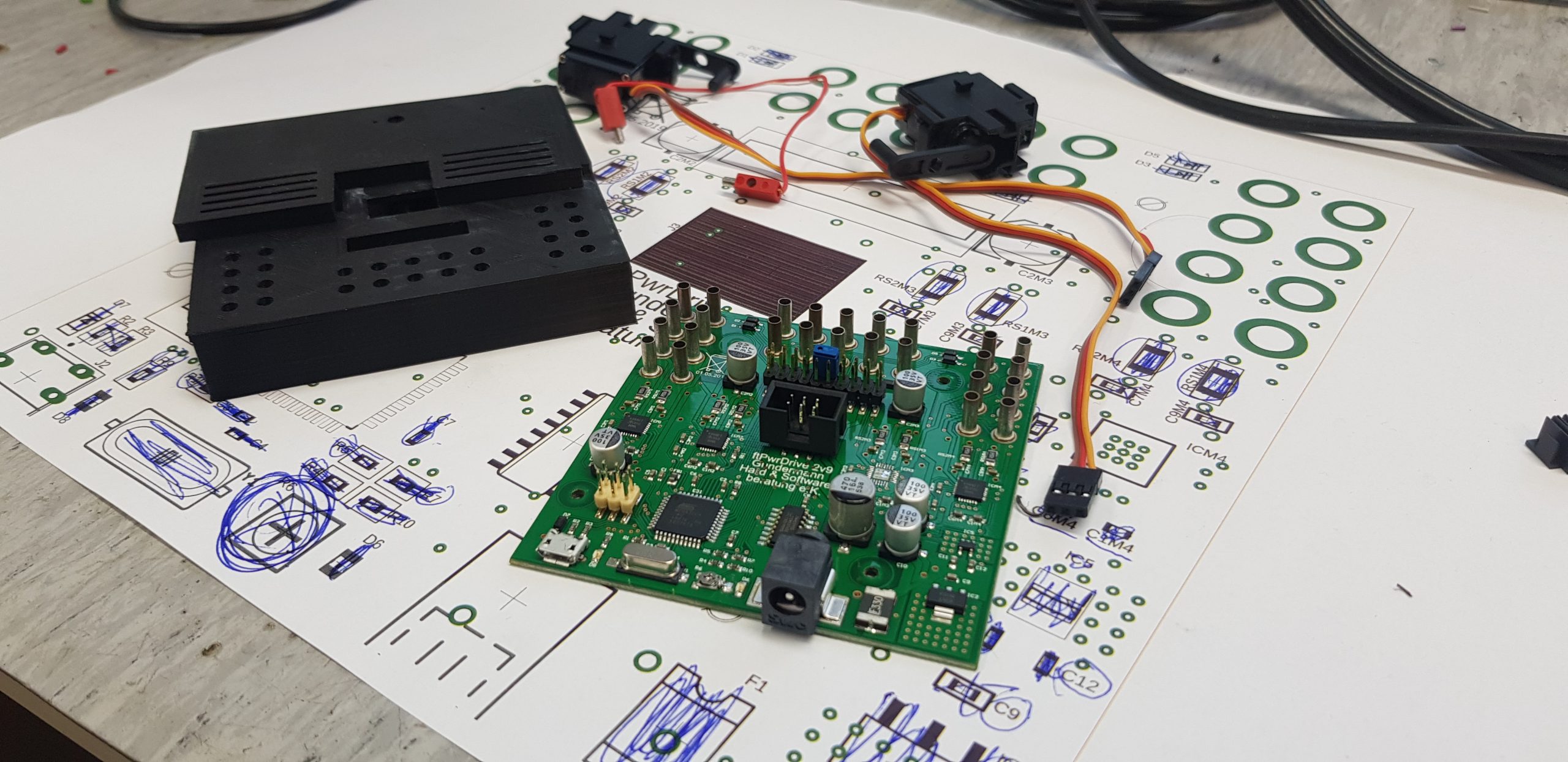
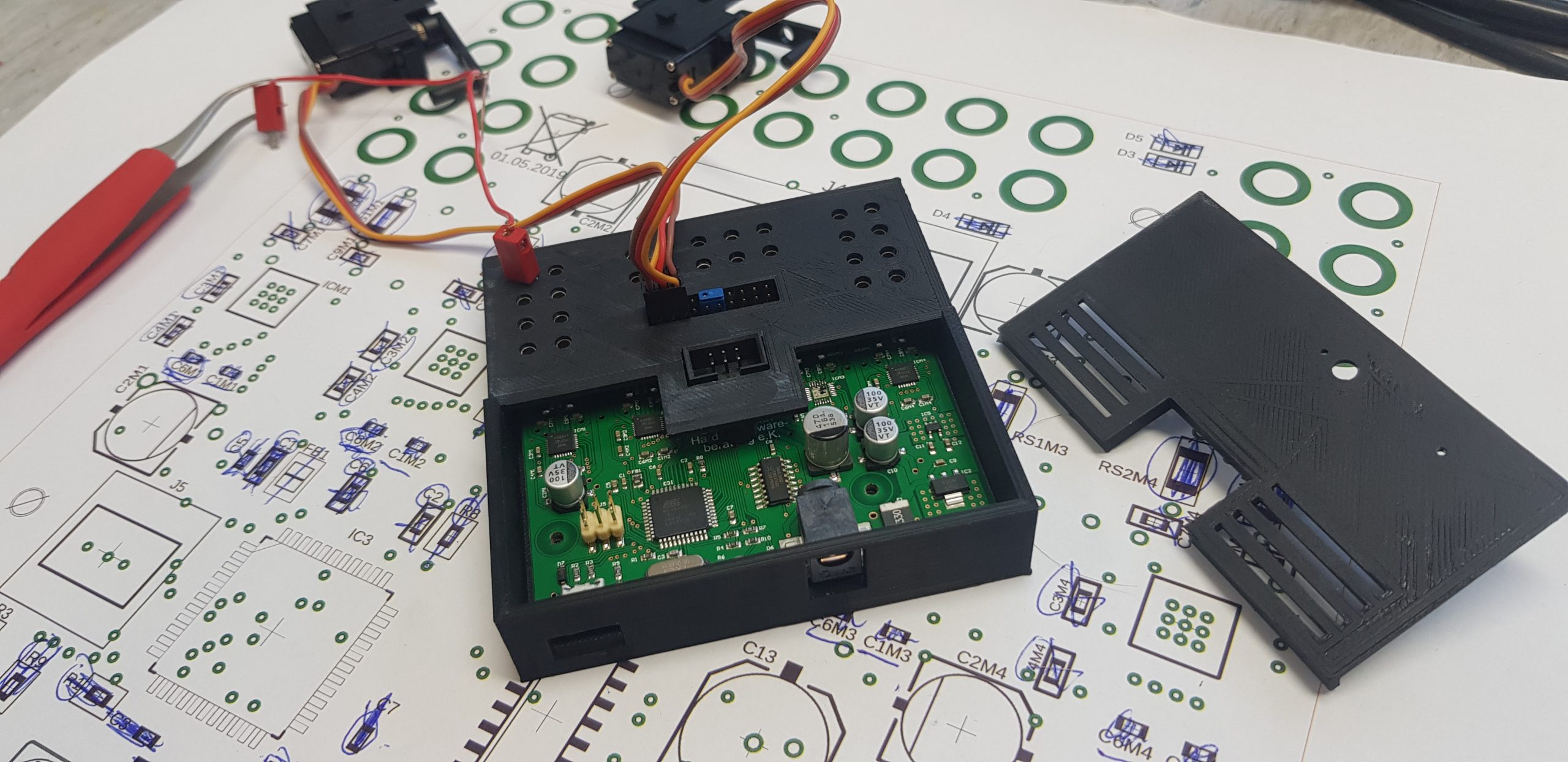



















Der ftPwrDrive Controller kann 4 Stepper Motoren und 4 PWM Servo Motoren ansteuern. Die Gehäusemaße entsprechen denen des ftDuino und der fischertechnik-Controller mit 90x90mm. Die Höhe des Gehäuses liegt etwas über die des ftDuino. Das Produktbild zeigt das erste Seriengerät. In der Produktgalerie finden sich weitere Bilder von der Handbestückung.
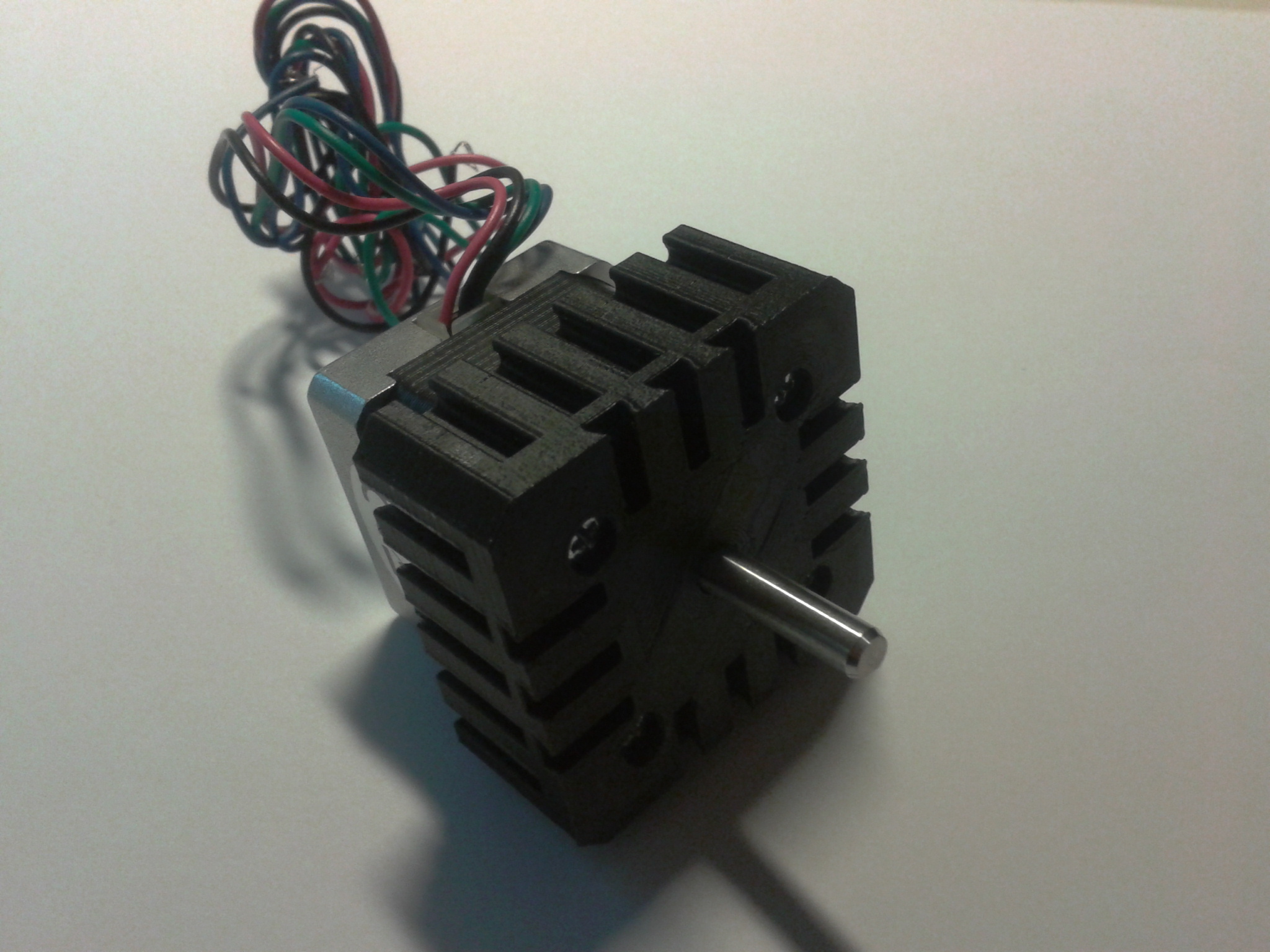
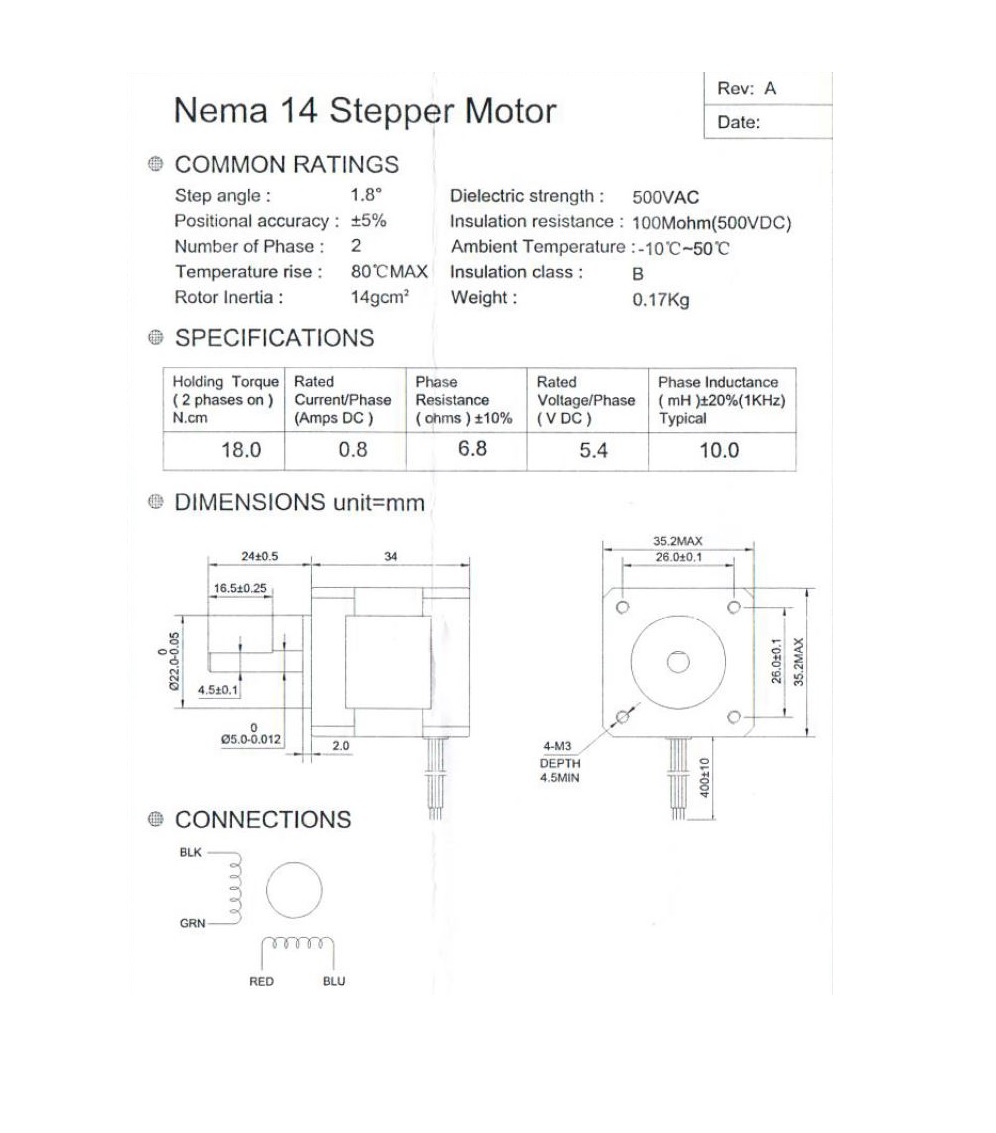
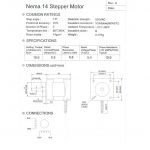
Am ftPwrDrive-Controller können bis zu vier Schrittmotoren angeschlossen werden. Hier bietet sich der Typ NEMA 14 an, der u.a. auch beim fischertechnik 3D Drucker zum Einsatz kommt. Durch eine Stromjustierung kann der Controller bei Bedarf auch auf andere Schrittmotoren eingestellt werden. Der Anschluss der Motoren erfolgt über die gewohnten ft-Bundhülsen.
NEMA ist eine standardisierte Baureihe von Schrittmotoren, die von verschiedenen Herstellern angeboten werden. Der Typ NEMA-14 passt aufgrund seiner Leistungsdaten und Größe gut zu fischertechnik.
Der Controller besitzt für die vier Schrittmotorausgänge jeweils einen Tastereingang. Diese werden von der Firmware sowohl als Endschalter als auch als Referenzpunkt genutzt.
Wird ein Endschalter ausgelöst, so stoppt die Firmware den Motor. Durch die höheren Leistungsdaten könnten sonst die fischertechnik Bausteine im Modell Schaden nehmen.
Gleichzeitig kann die Firmware den Endschalter als Referenz- oder Nullpunkt nutzen. Die Firmware fährt den Motor solange so dass er gerade nicht den Endschalter auslöst. Man erhält so eine gut reproduzierbare Referenzposition im Modell, auf der alle anderen Fahrkommandos aufsetzen können.
An die vier Servoausgänge können fischertechnik-Servos aus dem Control-Set oder kompatible Servos direkt angeschlossen werden.
Schrittmotoren sind sehr hungrig und kommen mit der ft-9V-Versorgung nicht in Gang. Wir haben den Controller für eine 12V Versorgung ausgelegt. Da ein NEMA-14-Motor pro Spule bis zu 0.8A Strom zieht, werden Netzteile mit hoher Leistung benötigt. Im Shop gibt es ein passendes Netzteil mit max. 5A Leistung. Die Buchse ist eine RASM722X von Switchcraft mit einem Innendurchmesser von 2,10mm und einem Außendurchmesser von 5,50mm.
Zur Einstellung der Stromstärke der Motoren wird es eine Referenzspannung (Vref) geben. Vref = Imax * 8 * Rsense. Rsense ist 0.068 Ohm. Bei Auslieferung der Geräte wird Imax = 0,7A angenommen und passt damit zu den angebotenen NEMA-14 Motoren. Die maximal unterstütze Leistung des Motors wird 1A sein.
Der Grund hierfür ist: Es gibt zwar Motoren mit 2A, allerdings wäre die maximale Leistung dann zu hoch. Dafür gibt es kein einfaches Netzteil mehr und es müssten andere Stecker genutzt werden. Unser Ziel ist eine einwandfreie Dauernutzung zu gewährleisten.
Für den harten Servo-Einsatz gibt es noch zusätzlich die Möglichkeit, diese über ein 5V USB-Netzteil zu versorgen.
Der Anschluss an den Controller erfolgt über den I²C-Bus. TX und ftDuino können direkt über den 6-poligen EXT-Stecker verbunden werden, der TXT benötigt zusätzlich einen Levelshifter wie zum Beispiel den ft-Extender. Die I2C Adresse ist frei wählbar.
Das Handbuch befindet sich hier.
Das Online Handbuch finden Sie hier. Hier finden Sie auch Beispiele für RoboPro.
Die aktuelle Firmware Version ist V0.94. Firmware Updates befinden sich hier.
Aktuell unterstützt die Firmware V0.94 folgende Features.
– Überwachung der Stromstärken für die Leistungstreiber.
– Setzen der I2C Adresse.
– Einstellen der Stromstärke für die Motoren zwischen 0.1 und 1.0 A in 0.1A Schritten.
– Setzen des Microsteppingmodus.
– Setzen der Verfahrgeschwindigkeit.
– Relative Distanz verfahren.
– Setzen eines Koordinatensystems.
– absolutes Verfahren im Koordinatensystem
– Auslesen der Endschalter und des Notstopps.
– gleichzeitiges Starten von Verfahrbewegungen.
– Setzen der Servo Position
– Setzen eines Offsets auf die Position des Servos
– Setzen der Positionen aller Servos gleichzeitig
– Funktion um Servo Port wie eine LED zu schalten
– Zu den set-Funktionen gibt es die analogen get-Funktionen
– Homing Funktionen
– setGearFactor, setRelDistanceR, setAbsDistanceR
Geplante Features:
– Endschalter für Referenzfahrten nutzen
– Synchrones Verfahren mehrerer Motoren.
– Sinusförmige Beschleunigung
Die Programmierung des ftPwrDrive kann in verschiedenen Umgebungen erfolgen. Eine RoboPro-Bibliothek ist verfügbar. Für den ftDuino und somit generell Arduino gibt es bereits eine Bibliothek. Für Python gibt es ebenfalls eine Bibliothek. Alle Bibliotheken finden Sie hier.
WEEE-Reg.-Nr. DE 45907218
Du musst angemeldet sein, um eine Rezension veröffentlichen zu können.
Ähnliche Produkte
-

ft-HAT – fischertechnik HAT für den Raspberry Pi (u.a. Raspberry Pi2, Pi3 und Pi4)
69,00 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

ft-OLED gelb/blau für ft-Extender blaues Gehäuse
9,95 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

ft-OLED weiß für ft-Extender schwarzes Gehäuse
9,95 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

ft-LIDAR im schwarzen Gehäuse zum Anschluß an den TX/ftDuino
12,50 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb
Das könnte dir auch gefallen …
-

M3 Schraube für NEMA 14 Halter und NEMA 14 Motor
0,10 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

NEMA 14 Halter für NEMA 14 Motor aus 3D-Drucker
3,00 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

NEMA 14 Motor passend zu ftPwrDrive Controller
16,49 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

ft-Extender zum einfachen Anschluß von I2C Geräten inkl. Spannungsversorgung
18,50 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb -

fischertechnik Stecker in grün gebraucht
0,39 €inkl. 19 % MwSt.
zzgl. Versandkosten
Weiterlesen -

fischertechnik Stecker in rot gebraucht
0,39 €inkl. 19 % MwSt.
zzgl. Versandkosten
Weiterlesen -

fischertechnik Mini-Taster schwarz gebraucht
5,00 €inkl. 19 % MwSt.
zzgl. Versandkosten
Weiterlesen -

Netzteil 12V, 5A Netzteil für ftPwrDrive
15,00 €inkl. 19 % MwSt.
zzgl. Versandkosten
In den Warenkorb
Rezensionen
Es gibt noch keine Rezensionen.